

Este driver basado en L298, tiene un puente completo diseñado para cargas inductivas como reles, solenoides, motores unipolares y Steppers.
Permite conectar 2 motores, controlando la velocidad y sentido de giro en forma independiente.
Caracteristicas
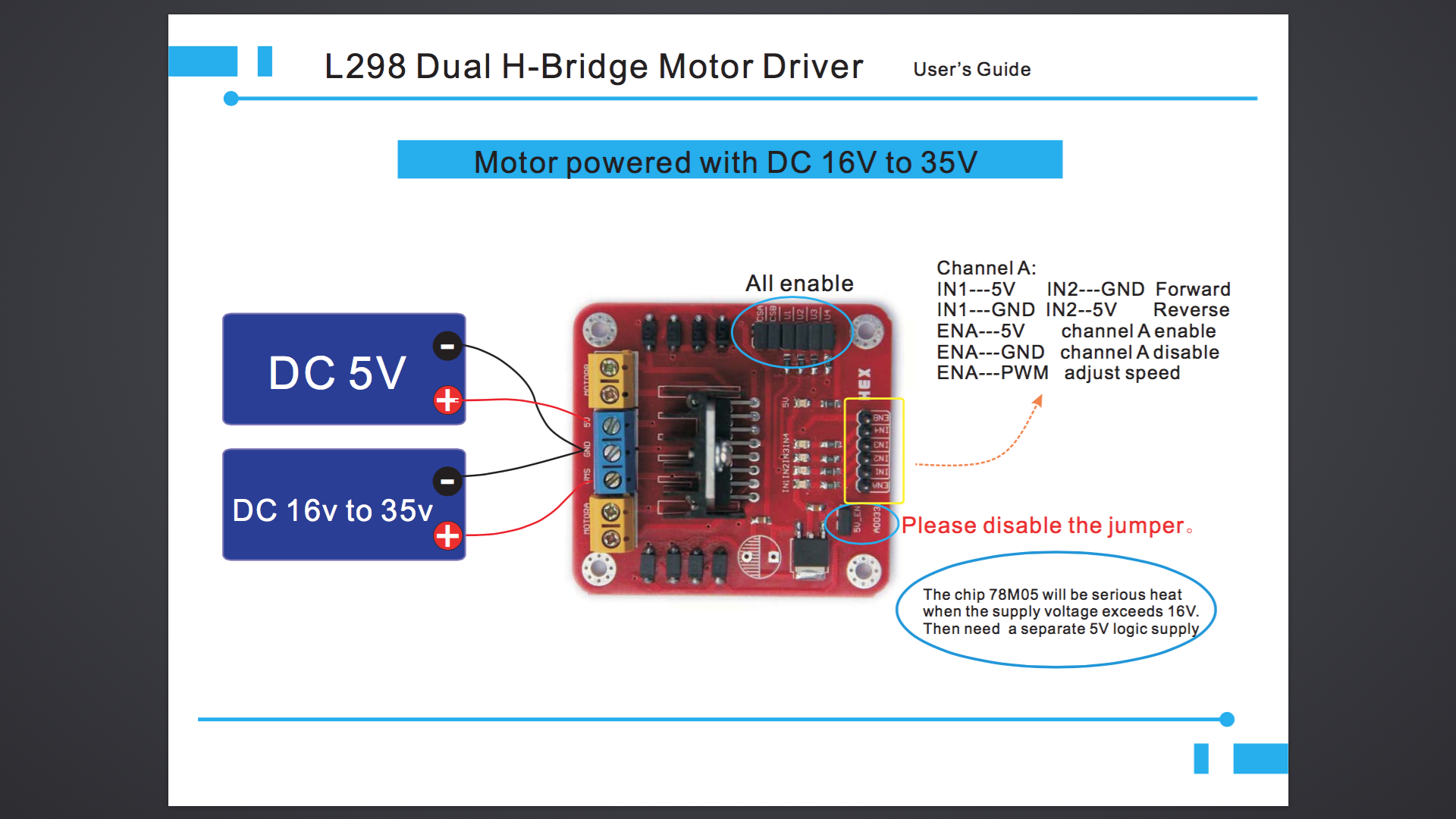
- Driven part of the terminal supply area Vs: +5 V ~ +35 V; such as the need to take power within the board, the supply area Vs: +7 V ~ +35 V
- Driven part of the peak current Io: 2A
- The logical part of the terminal supply area Vss: +5 V ~ +7 V (can take power within the board +5 V)
- The logical part of the operating current range: 0 ~ 36mA
- Control signal input voltage range:
- Low:-0.3V ≤ Vin ≤ 1.5V
- High: 2.3V ≤ Vin ≤ Vss
- Enable signal input voltage range:
- Low: -0.3 ≤ Vin ≤ 1.5V (control signal is invalid)
- High: 2.3V ≤ Vin ≤ Vss (control signal active)
- Maximum power consumption: 20W (when the temperature T = 75 ℃)
- Storage temperature: -25 ℃ ~ +130 ℃
- Other Extensions: control of direction indicators, the logic part of the plate to take power interface.
- Driver Board Size: 55mm * 60mm * 30mm
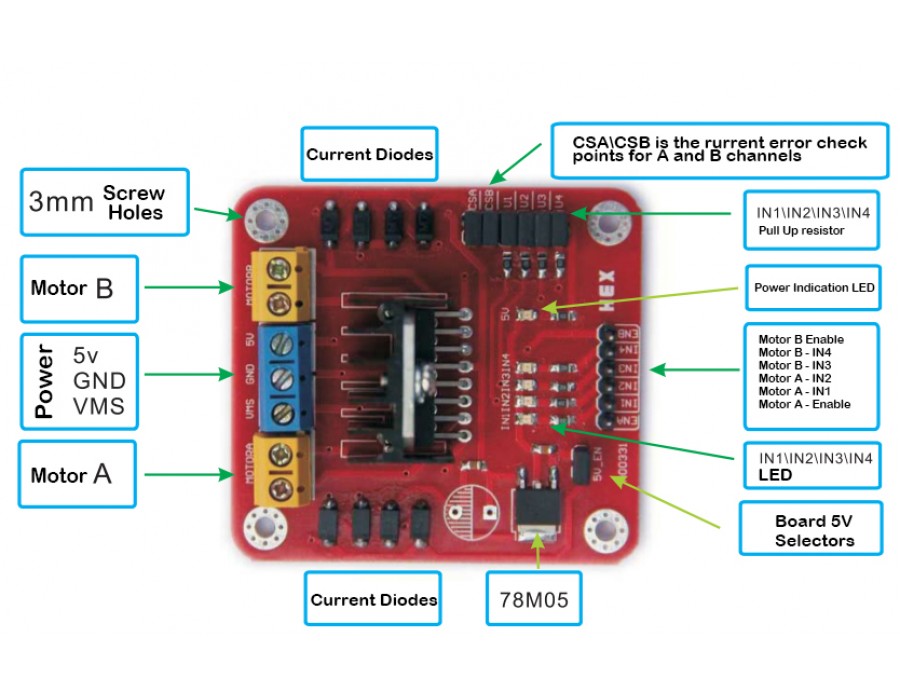
JUMPERS
CSA: Entre éste pin y la Tierra, está conectado el sensor que controla la corriente de carga. Si el pin está cerrado se ignora la función de detección.
CSB: Entre éste pin y la Tierra, está conectado el sensor que controla la corriente de carga. Si el pin está cerrado se ignora la función de detección.
5V-EN: Si está cerrado, (Enabled) se produce una salida de 5V en la salida de los motores. Si está abierto, se necesita suplir de 5V.
U1—Enable In1 pull-up resistor [10k].
U2—Enable In2 pull-up resistor [10k].
U3—Enable In3 pull-up resistor [10k].
U4—Enable In4 pull-up resistor [10k].
IN1 IN2 : Señales para controlar el motor A
IN3 IN4 :Señales para controlar el motor B
ENA ENB: Habilita o no los motores.
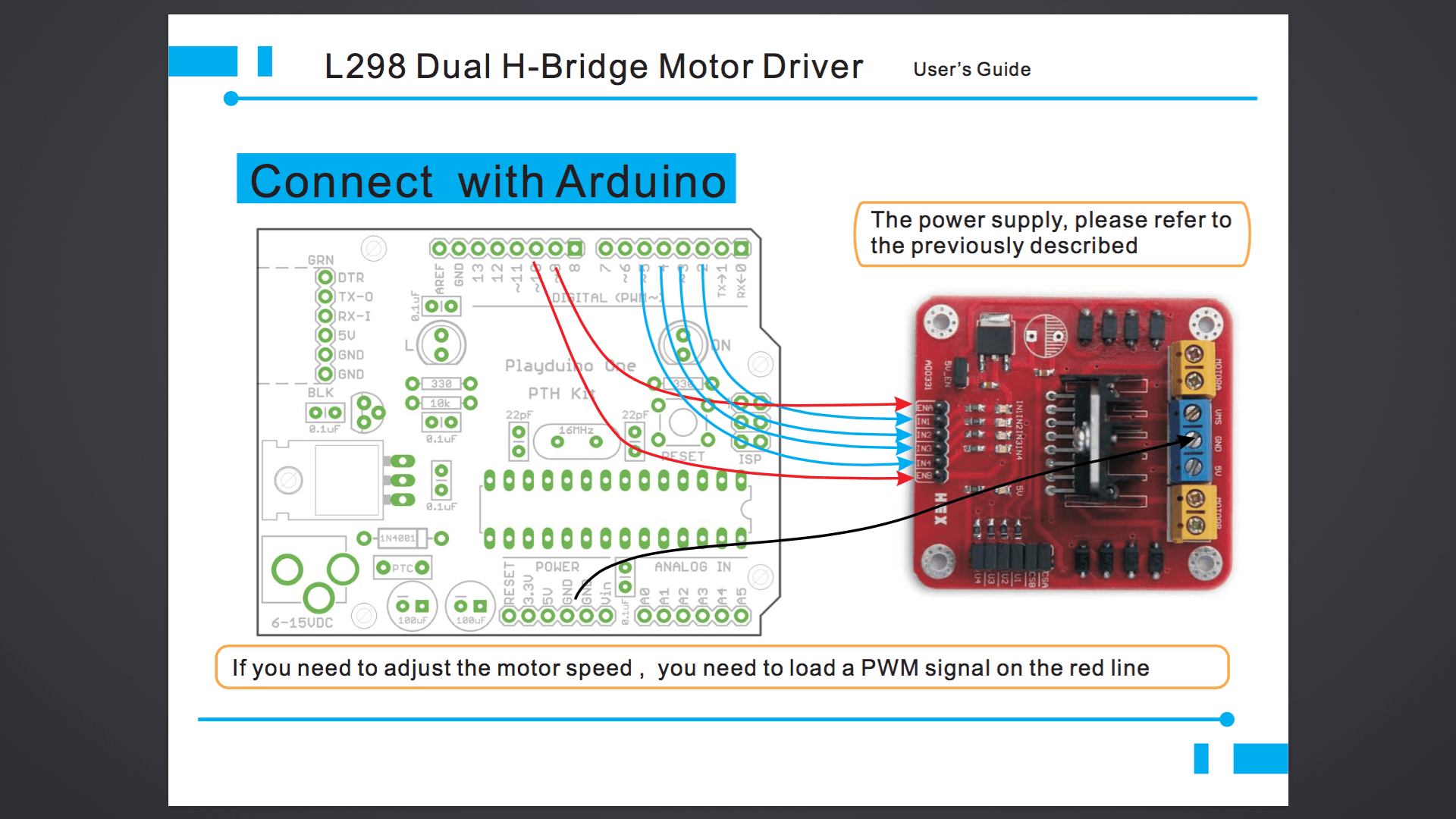
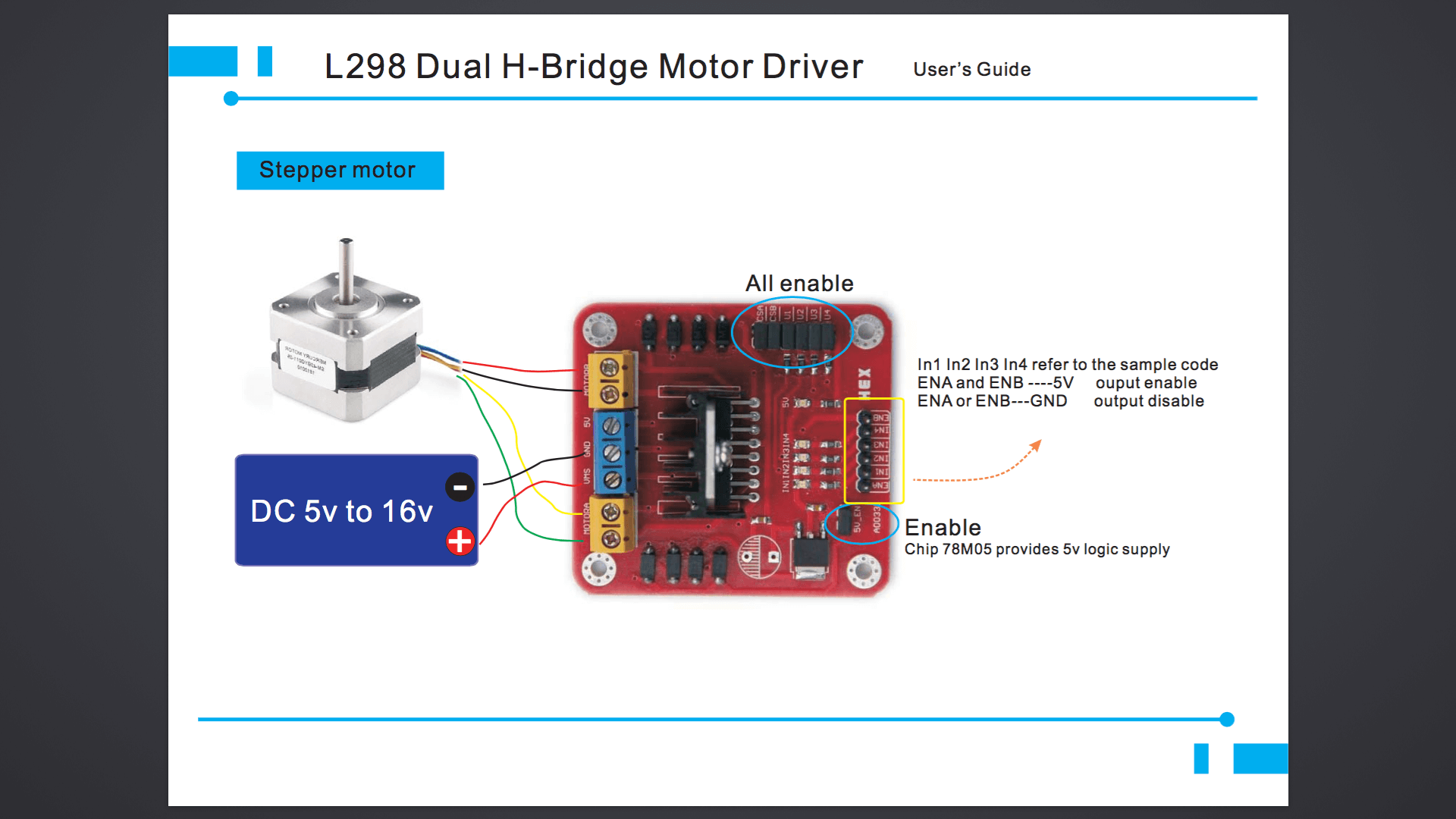
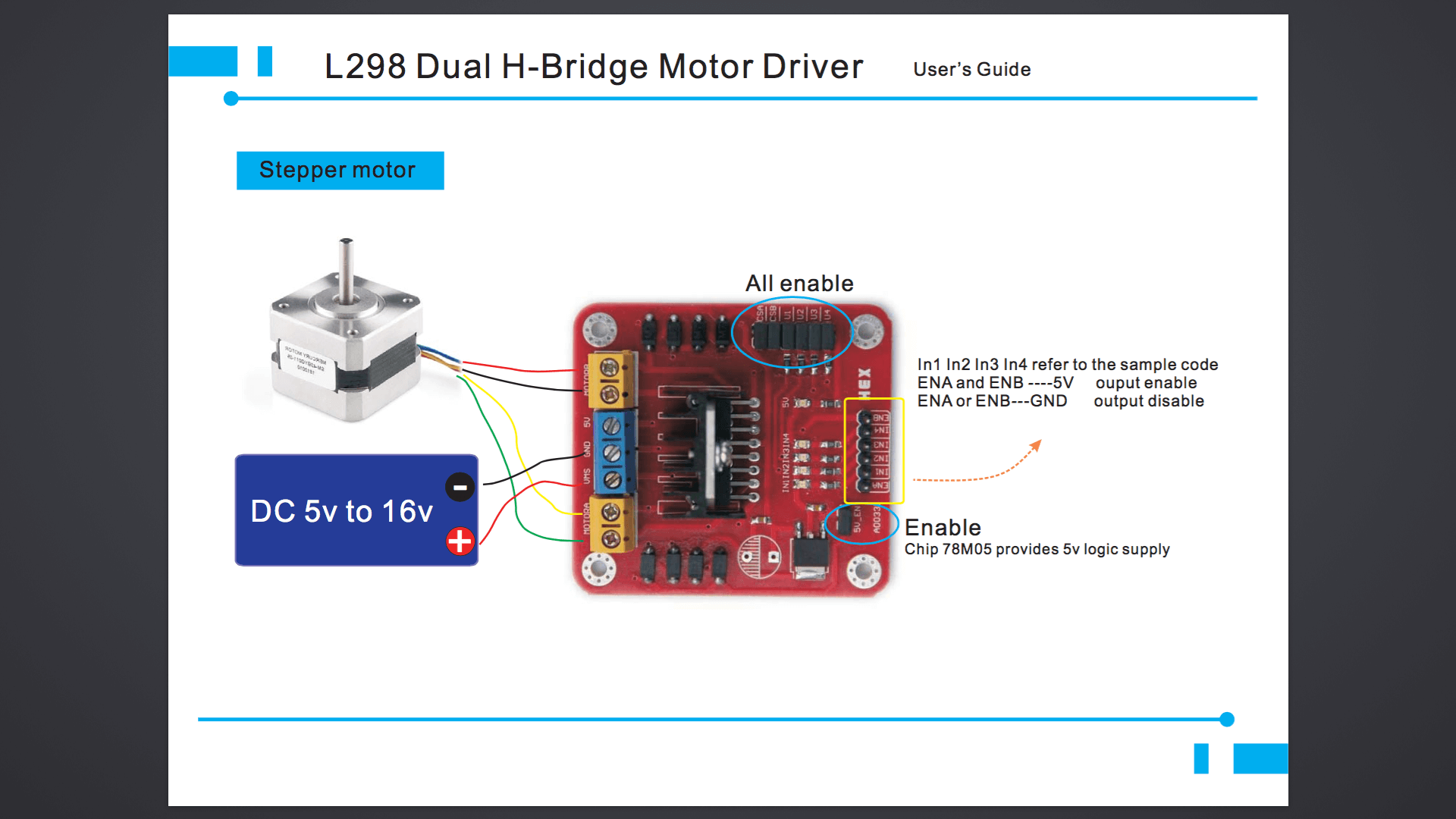
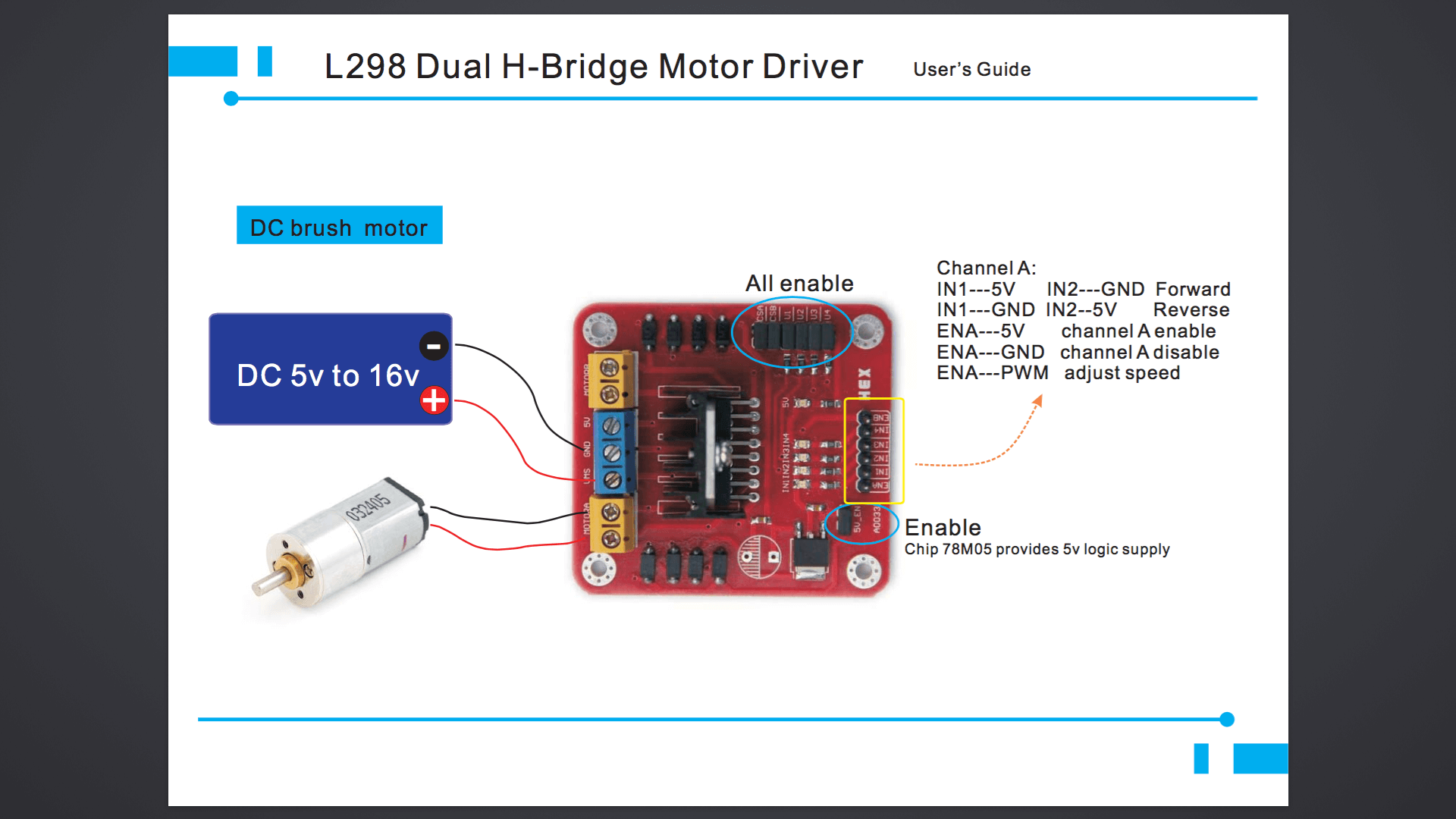
Esquemas de conexiones:


Codigo Ejemplo
/*##### Motor Shield (L298N) #####*/
/*
* Conexión de los pines de Arduino --> L298N
* 5 --> ENA
* 6 --> ENB
* 2 --> IN1
* 3 --> IN2
* 4 --> IN3
* 7 --> IN4
*/
const int ENA = 5;
const int ENB = 6;
/* Seteo de los INx para determinar la dirección del motor
* IN1: HIGH; IN2: LOW --> Direction 1
* IN1: LOW; IN2: HIGH --> Direction 2
* IN3: HIGH; IN4: LOW --> Direction 1
* IN3: LOW; IN4: HIGH --> Direction 2
*/
const int IN1 = 2;
const int IN2 = 3;
const int IN3 = 4;
const int IN4 = 7;
void setup()
{
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// Habilita Motor A y Motor B:
digitalWrite(ENA, HIGH);
digitalWrite(ENB, HIGH);
// Serial communication
Serial.begin(9600);
}
void loop()
{
Serial.println("Motor A & B: Dirección 1");
MotorAB_Direction1(1000);
Serial.println("Motor A & B: FRENA");
MotorAB_Brake(1000);
Serial.println("Motor A & B: Dirección 2");
MotorAB_Direction2(1000);
Serial.println("Motor A & B: FRENA");
MotorAB_Brake(1000);
}
/* FUNCIONES */
void MotorAB_Direction1(int milliseconds)
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
if (milliseconds > 0)
delay(milliseconds);
}
void MotorAB_Direction2(int milliseconds)
{
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
if(milliseconds > 0)
delay(milliseconds);
}
void MotorAB_Brake(int milliseconds)
{
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
if(milliseconds > 0)
delay(milliseconds);
}
Ejemplo 2
Realicemos el siguiente circuito
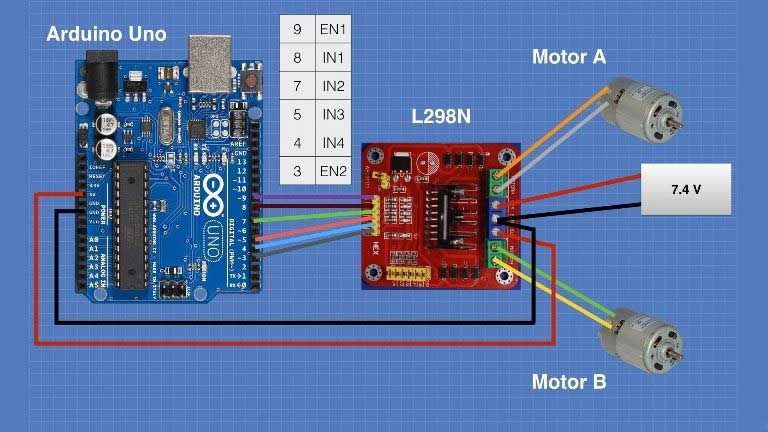
Nótese como las dos tierras, la del Arduino y la segunda fuente de 7,4v están unidas.
En la siguiente tabla vemos los efectos de polarizar los pares (1,2) y (3,4) desde el Arduino.
| In(x) | In(y) | Efecto en el motor |
| HIGH | HIGH | Apagado |
| HIGH | LOW | Gira izqierda |
| LOW | HIGH | Gira Derecha |
| LOW | LOW | No se usa |
Aqui mostrando que la polarización de In1 e In2, hace que en motor gire en un sentido u otro.
 |
 |
Programa:
/*
L298N Driver motor
Demonstrates functions of L298N Motor Controller
Gustavo Dutour 2017
https://roboticadelacosta.uy
*/
// Motor A
int enA = 9;
int in1 = 8;
int in2 = 7;
// Motor B
int enB = 3;
int in3 = 5;
int in4 = 4;
void setup()
{
// Seteamos los pines de salida
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void demoUno()
{
// Ambos motores a la misma velocidad
// Encender Motor A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// Setear velocidad a 200 ... Rangos posibles: 0~255
analogWrite(enA, 200);
// Encender Motor B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// Setear velocidad a 200 ... Rangos posibles: 0~255
analogWrite(enB, 200);
delay(2000);
// Cambiar dirección de giro
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// Detener Motores
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void demoDos()
{
// Variamos la velocidad de los motores
// Note que la maxima velocidad está dada por el voltage
// Encender Motores
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// Acelerar de minimo a Maximo
for (int i = 0; i < 256; i++)
{ analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// Desacelerar de Maximo a Minimo
for (int i = 255; i >= 0; --i)
{ analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// Detener Motores
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{ demoUno();
delay(1000);
demoDos();
delay(1000);
}
Driver Dual o Puente-H basado en el L298 added by admin on
View all posts by admin →